Günter Quast, Juli 2022 (letzte Änderung Juli
2023)
Hinweise
zur Datenauswertung in den physikalischen Praktika
In den Praktika zur Physik führen Sie selbständig Experimente zur
Überprüfung einfacher physikalischer Modelle durch. Dabei untersuchen
Sie physikalische Phänomene mit unterschiedlichen Messgeräten und
Messmethoden, werten die resultierenden Daten aus und dokumentieren die
Ergebnisse so, dass sie aus den Aufzeichnungen reproduzierbar sind.
Die Qualifikationsziele der Anfängerpraktika Physik sind im
Modulhandbuch beschrieben:
Beherrschung unterschiedlicher Messgeräte und Messmethoden,
Erfassung und Darstellung experimenteller Daten,
Analyse der Daten und Durchführung der Fehlerrechnung,
Erstellung eines Messprotokolls.
Diese Anleitung gibt eine Übersicht über Grundlagen, empfohlene
Software-Werkzeuge und Vorgehensweisen zur Datenauswertung in
der physikalischen Praktika.
Allgemein ist das Ziel der Datenanalyse in der Physik zu überprüfen,
ob ein angenommenes Modell durch die experimentellen Daten im Rahmen
von deren Unsicherheiten adäquat beschrieben wird. Dazu müssen
zunächst die Unsicherheiten der Ausgangsmessungen quantifiziert werden.
Anschließend werden unter Annahme der Gültigkeit des Modells freie
Modellparameter und deren aus den Unsicherheiten der Messdaten
resultierende Unsicherheiten bestimmt. Früher nannte man diesen letzten,
meist mit analytischen Näherungsrechnungen durchgeführten Schritt der
Bestimmung der Parameterunsicherheiten “Fehlerrechnung”. Mit der
allgemeinen Verfügbarkeit von Computern mit ausreichend Rechenleistung
werden in der modernen Datenauswertung numerische Verfahren zu Anpassung
von Modellfunktionen an die Messdaten verwendet, die sowohl die
Überprüfung der Gültigkeit der Modellhypothese als auch die Bestimmung
der besten Parameterwerte und deren Unsicherheiten erlauben.
1
Übersicht: Die einzelnen Schritte der Datenauswertung
1. Quantifizierung der Unsicherheiten aller eingehenden
Messgrößen
Die Unsicherheiten der relevanten Messgrößen entnehmen Sie entweder
den Datenblättern der verwendeten Messgeräte, oder Sie führen die
gleiche Messung mehrmals aus und bestimmen die Unsicherheiten aus der
Streuung der erhaltenen Ergebnisse als Standardabweichung \(\sigma\) der resultierenden
Häufigkeitsverteilung. Mit einiger Erfahrung ist es auch möglich, die
Unsicherheiten für typische Messvorgänge zuverlässig zu schätzen.
2. Durchführung der Messung
Als nächstes wird eine Messreihe, üblicherweise als Wertepaare (\(x_i, y_i\)), aufgenommen. Diese sollten in
einer Datei im Textformat abgelegt werden, damit sie sowohl von Menschen
als auf von Computerprogrammen gelesen werden können. Wichtig ist die
sorgfältige Protokollierung auch der sogenannten “Metadaten”, die den
Ursprung und die Bedeutung der Messdaten dokumentieren. Es ist ratsam,
schon in diesem ersten Schritt eine grafische Darstellung der Daten zur
visuellen Kontrolle des Messprozesses zu erstellen. Einfache Fehler bei
der Aufnahme der Messreihe können Sie dabei unmittelbar entdecken.
3. Anpassung eines Modells an die Messdaten
Die Daten und eine oder mehrere Modellhypothese(n) werden verglichen.
In der Regel enthält die Modellhypothese noch freie Parameter, und
außerdem ist das Modell in der Regel “überbestimmt”, d.h. es gibt mehr
Datenpunkte, als zur Bestimmung der freien Parameter notwendig sind. In
solchen Fällen werden in einem Anpassungsschritt die optimalen Werte der
freien Parameter bestimmt, die den kleinsten “Abstand” zwischen den
Werten der Modellfunkton \(f_i=f(x_i, a_1,
..., a_{n_p})\) mit \(n_p\)
Parametern \(a_i\) und den \(N\) Messwerten \(y_i\) ergeben. Als Abstandsmaß wird dabei
üblicherweise die von Carl Friedrich Gauß vorgeschlagene Summe \(S\) der Residuenquadrate (“Summe der
kleinsten Fehlerquadrate”) verwendet:
Als Ergebnisse des Anpassungsalgorithmus erhalten Sie den Wert \(S_0\) der Summe der Residuenquadrate am
Optimum der Parameterwerte, \(S_0(\hat{a}_1,
..., \hat{a}_{n_p})\). Wenn das Modell passt, sollten
Abweichungen rein statistischer Natur sein. Auf Grund der Definition der
Standardabweichung ist der Erwartungswert der quadrierten Abweichung
zwischen einer Messung und dem wahren Wert gleich Eins; für \(S_0\) am Optimum erwartet man also einen
Wert von \(N\), der Anzahl der
Messungen. Es muss allerdings berücksichtigt werden, dass die Daten im
Anpassungsprozess bereits genutzt wurden, um die \(n_p\) Parameterwerte zu optimieren. In
diesem Fall ist der erwartete Wert von \(<S_0> = N - n_p = N_f\) (Zahl der
Freiheitsgrade).
5. Extraktion der Modellparameter und von deren
Unsicherheiten
Wenn die Modellhypothese nicht verworfen wurde, werden im letzten
Schritt die Modellparameter bestimmt. Die optimalen Parameterwerte
wurden bereits im vorangegangenen Schritt vorausgesetzt - bestimmt
werden müssen noch die Parameterunsicherheiten. Diese ergeben sich aus
der Verlauf des Wertes von \(S\) in der
Nähe des Minimums \(S_0\). Das
Verfahren wird weiter unten ausführlich erläutert.
2 Grundsätzliches zum
Messprozess
Im Messprozess werden Daten in einer sehr genau
kontrollierten physikalischen Umgebung bestimmt; dies wird als Versuch
oder auch Experiment bezeichnet. Der Messprozess liefert Zahlenwerte,
die mit Werten aus Vorhersagen verglichen werden, um Aussagen über die
Gültigkeit theoretischer Modelle machen zu können.
Messen heißt dabei grundsätzlich, eine physikalische
Größe mit einer Referenzgröße, einer Maßeinheit, zu
vergleichen. Dabei kann ein direkter Vergleich
durchgeführt werden - z.B. die Länge eines Objekts mit einem Maßstab
oder eine elektrische Spannung mit einer Spannungsreferenz. Häufig
werden Messungen auch indirekt durchgeführt, indem eine präzise bekannte
und gut überprüfte Annahme verwendet wird, z.B. eine Längenmessung über
die Laufzeit von Licht oder eine Strommessung mit Hilfe des ohmschen
Gesetzes.
Beim Messprozess werden Eingangsgrößen in
Messsignale gewandelt, aus denen die Messgrößen gewonnen wird. Diese
Messgrößen werden schließlich mit einer Modellannahme verglichen, um die
Ergebnisgröße(n) zu erhalten. Ein Beispiel ist die Bestimmung der
Erdbeschleunigung als Ergebnisgröße aus der Ausdehnung einer Feder mit
bekannter Federkonstanten als Messgröße bei Anhängen einer
Referenzmasse. Heute werden Messgrößen fasst ausnahmslos als elektrische
Signale erfasst, die in Analog-Digital-Wandlern in Zahlenwerte umgesetzt
und dann als digitale Daten weiter verarbeitet werden.
Alle Messgrößen sind von unvermeidbaren
Unsicherheiten betroffen, die die wahren Werte der
Größen überlagern und diese damit zufällig verändern. Bei einem
Messergebnis handelt es sich also um eine “Schätzung” des wahren Wertes
im Sinne der Statistik, deren Unsicherheit immer zusätzlich angegeben
werden muss:
\(m = (\hat{m} \pm \sigma_m)
[m]\,\).
Dabei ist \(\hat{m}\) der
Schätzwert, \(\sigma_m\) die
Unsicherheit auf den Schätzwert, und \([m]\) ist die Einheit der Messgröße. Die
Angabe eines Messergebnisses ohne Unsicherheit und Einheit ist, wie
unten genauer erläutert wird, praktisch wertlos!
Häufig werden Unsicherheiten auch als dimensionslose
relative Unsicherheiten angegeben,
\(\sigma_m^{(R)} =
\frac{\sigma_m}{m}\,\).
Werden mehrere Messgrößen aufgenommen, so sind viele der dabei
auftretenden Unsicherheiten (statistisch) unabhängig voneinander, d.h.
die Änderung einer der Messgröße im Rahmen ihrer Unsicherheiten ändert
die Werte anderer Messgrößen nicht. Solche Unsicherheiten werden als
“statistische Unsicherheiten” bezeichnet. Sie können durch
mehrfache Messung bestimmt und reduziert werden.
Es gibt bei Messungen aber fast immer auch Effekte, die alle
Messwerte gleichermaßen betreffen, also nicht unabhängig sondern
korreliert sind. Beispiele sind die
Kalibrationsunsicherheiten der verwendeten Messgeräte, z.B. ein auf
Grund von Temperatureffekten zu langer oder zu kurzer Maßstab oder eine
nicht ganz korrekte Spannungsreferenz. Andere Quellen solcher
Unsicherheiten sind als klein angenommene, vernachlässigte
Umgebungseffekte wie Reibung oder Luftwiderstand bei mechanischen
Versuchen, oder oft nicht vermeidbare Näherungen in den verwendeten
theoretischen Modellen. Solche korrelierten Unsicherheiten werden als
“systematische Unsicherheiten” bezeichnet. Systematische Unsicherheiten
können durch Mehrfachmessung nicht reduziert werden. Häufig gibt es zur
Bestimmung systematischer Unsicherheiten lediglich Konventionen, aber
keine allgemein gültigen oder anerkannten Verfahren.
Die Angabe eines Messergebnisses ohne Unsicherheit ist praktisch
wertlos, denn die Überprüfung der Übereinstimmung einer Messung mit
einer theoretischen Erwartung ist nur im Rahmen der Unsicherheiten
möglich. Bei dieser Bewertung handelt es sich aus Sicht der Statistik um
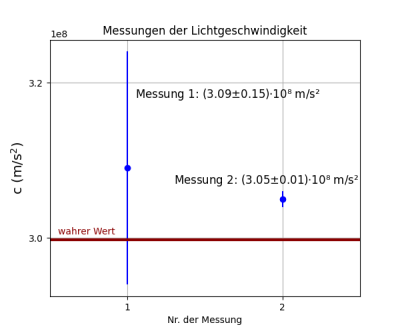
einen Hypothesentest. Ein Messergebnis wird grafisch
dargestellt als Messpunkt mit “Fehlerbalken”, der die Größe der
Unsicherheit symbolisiert. Wir nehmen dazu an, dass die Messwerte aus
einer Messreihe mit unabhängigen Messungen unter identischen Bedingungen
gaußförmig um ihren Mittelwert verteilt sind (“gaußförmige
Unsicherheit”), eine Begründung dazu wird in Kapitel 3 gegeben. In der Physik verwenden wir die
Konvention, dass die Länge des Fehlerbalkens zwei Standardabweichungen
\(\sigma\) dieser Gaußverteilung
entspricht. Innerhalb des Intervalls [m-\(\sigma\), m+\(\sigma\)] liegen damit 68,3% der
Messwerte.
Ein Beispiel zeigt die Grafik unten. Bei der ersten
Messung überlappt der Fehlerbalken mit dem wahren Wert, im “Slang” der
Physik würden wir sagen: “Die Messung stimmt innerhalb von einem \(\sigma\) (d.h. einer Standardabweichung)
mit dem wahren Wert überein”. Die zweite Messung ist nicht mit dem
wahren Wert verträglich: sie liegt zwar näher am wahren Wert, besitzt
aber eine viel kleinere Unsicherheit als die erste Messung, wir sagen:
“sie weicht um 5 \(\sigma\) ab”.
3 Wichtige Grundlagen der
Statistik
Auf Grund des zentralen Grenzwertsatzes der
Wahrscheinlichkeitstheorie folgen die aus vielen
Einzelbeiträgen bestehenden zufälligen Abweichungen \(u\) der Messwerte vom wahren Wert einer
Gaußverteilung mit Mittelwert Null und Standardabweichung \(\sigma\),
3.1
Schätzung der Unsicherheit durch wiederholte Messung
Durch \(N\)-mal wiederholte Messung
kann die Unsicherheit, definiert als die auf Verzerrung korrigierte
empirische Standardabweichung (auch:
Stichprobenstandardabweichung) der Messwerte, bestimmt werden:
\(\sigma^2 =
\frac{1}{N-1}\displaystyle\sum_{i=1}^N (m_i - \bar m)^2\),
wobei \(\bar{m} =
\frac{1}{N}\displaystyle\sum_{i=1}^N m_i\,\) der Mittelwert der
Messungen ist.
Falls Sie diese Gleichung selbst in Programmcode implementieren
möchten: durch folgende Umformung erhalten wir die numerisch effizienter
zu berechnende Darstellung
Wenn mehrere Größen gleichzeitig gemessen werden, stellt sich die
Frage, ob sie unabhängig voneinander sind, oder ob es einen Zusammenhang
zwischen den statistischen Effekten gibt, beide Größen also z.B.
bevorzugt in die gleiche Richtung abweichen. Als Maß dafür eignet sich
die Kovarianz zweier Größen \(x\) und \(y\),
Die Kovarianz der Größen \(m_x\) und
\(m_y\) ist Null, wenn sie unabhängig
sind. Wenn sie vollständig korreliert sind, nimmt sie den Wert \(\sigma_{m_x} \sigma_{m_y}\) an. Deshalb
wird der Korrelationskoeffizient wie folgt
definiert:
Zwei Größen mit \(\rho>0\) werden
als korreliert, Größen mir \(\rho<0\) als
antikorreliert bezeichnet.
Wenn es mehr als zwei Messgrößen \(m_i\) gibt, fassen wir die Kovarianzen von
Paaren von Messgrößen zur Kovarianzmatrix \(\mathbf V\) zusammen, deren Elemente
gegeben sind durch:
Die Diagonalelemente \(V_{i,i}\)
entsprechen den quadrierten Standardabweichungen der Messgrößen, \(V_{i,i} = {\rm cov}(m_i, m_i) =
{\sigma_{m_i}}^2\). Für unkorrelierte Messgrößen mit
verschwindenden Kovarianzen ist \(\mathbf
V\) eine Diagonalmatrix. Die Elemente der Kovarianzmatrix lassen
sich durch Mehrfachmessungen von Paaren \((m_i, m_j)_k\) durch Anwenden der
Definitionsgleichung für die Kovarianz auch empirisch aus den Daten
bestimmen.
Das Resultat einer gleichzeitigen Messung von zwei oder mehr
Messgrößen sollte also immer als Messwerte, Einheiten und
Kovarianzmatrix angegeben werden.
3.2 Fortpflanzung der
Unsicherheiten
Werden mehrere Messgrößen \(m_i,\,{\small
i=1, \ldots, n}\) bestimmt, von denen eine gesuchte Ergebnisgröße
\(g(m_i)\) abhängt, so wird die
Standardabweichung \(\sigma_g\) von
\(g(m_i)\) näherungsweise durch die
Fehlerfortpflanzungsformel bestimmt:
Anmerkung 1: Zur Herleitung wird eine Taylorentwicklung von
\(g(m_i)\) um die Messwerte \(m_i\) durchgeführt; die Formel ist also nur
anwendbar, wenn die Funktion im Bereich der Unsicherheiten \(\sigma_i\) gut durch eine Gerade
beschrieben wird.
Anmerkung 2: Diese Gleichung gilt nur für unabhängige, d.h.
unkorrelierte Messungen. Wenn die Messungen korreliert sind, muss deren
Kovarianzmatrix berücksichtigt werden. Für den Spezialfall von zwei
Messungen lautet der Ausdruck für \(\sigma_g\):
\({\sigma_g}^2 = \left(\frac{\partial
g}{\partial m_1} \right)^2 \, {\sigma_1}^2 + \left(\frac{\partial
g}{\partial m_2} \right)^2 \, {\sigma_2}^2 + 2 \frac{\partial
g}{\partial m_1} \frac{\partial g}{\partial m_2} {\rm cov}(m_1,
m_2)\,\) mit der Kovarianz \({\rm
cov}(m_1, m_2)\) von \(m_1\) und
\(m_2\,\).
3.2.1 Standardabweichung des
Mittelwerts
Wird die Fehlerfortpflanzungsformel auf den Mittelwert von \(N\) unabhängigen Messungen angewendet, so
ergibt sich für die Standardabweichung des Mittelwerts das wichtige
Ergebnis
\(\sigma_{\bar{m}} =
\frac{\sigma}{\sqrt{N}}\,\);
d.h. die Unsicherheit auf die Messgröße reduziert sich durch
unabhängige, wiederholte Messungen. Die Reduktion der
Unsicherheit skaliert mit der Wurzel der Zahl der Messungen, z.B.
halbiert sich die Unsicherheit mit der vierfachen Zahl von
Messungen.
3.3
Zusammenhang der Summe der Residuenquadrate mit der \(\chi^2\)-Verteilung
Das Ziel einer Messung ist es, ein physikalisches Modell durch dem
Vergleich mit der Messreihe zu überprüfen (Hypothesentest). Wenn das
Modell geeignet ist, können die Modellparameter durch die Messwerte (im
statistischen Sinne) “geschätzt” werden. Im physikalischen Praktikum
kommt dazu häufig die \(\chi^2\)-Methode zum Einsatz, die
auf einem Zusammenhang der in Kapitel 1
eingeführten Summe der Residuenquadrate \(S\) mit der \(\chi^2\)-Verteilung beruht. Werden die
Messwerte in die Gleichung für \(S\)
eingesetzt, kann \(S\) als Funktion der
Modellparameter aufgefasst werden und deren Werte am Minimum von \(S\), hier als \(S_0\) bezeichnet, liefern Schätzwerte für
diese Parameter. Bei gaußförmigen Unsicherheiten der Messwerte
entspricht \(S_0\) der Summe von
Quadraten von \(n\) gaußverteilten
Zufallszahlen \(z_i\), \(\chi^2=\sum_{i=1}^n {z_i}^2\), deren
Verteilungsdichte durch die \(\chi^2\)-Verteilung gegeben ist. Die \(\chi^2\)-Verteilung besitzt einen Parameter
\(N_f\), der als “Anzahl der
Freiheitsgrade” bezeichnet wird. Werden aus \(N\) Messwerten \(n_p\) Modellparameter bestimmt, so folgt
\(S_0\) einer \(\chi^2\)-Verteilung mit \(N_f= N - n_p\) Freiheitsgraden, \(\chi2(S_0, N_f)\).
Die \(\chi^2\)-Verteilung ist in
allen gängigen Programmpaketen zur Statistik implementiert, so dass
leicht Werte der Dichteverteilung oder der kumulativen Verteilung und
damit Quantile der Verteilung berechnen werden können. Die \(\chi^2\)-Verteilung \(\chi^2(x; N_f)\) hat einen Erwartungswert
von \({\rm E} [\chi^2(N_f)] = N_f\) und
eine Varianz \(\sigma^2 = {\rm
Var}[\chi^2(N_f)] = 2 N_f\).
Für den in einem Experiment beobachteten Wert \(S_0\) kann mit Hilfe der bekannten Quantile
der \(\chi^2\)-Verteilung die
sogenannte \(\chi^2\)-Wahrscheinlichkeit \(p_{\chi^2}\) angeben werden. Dies ist die
Wahrscheinlichkeit dafür, bei einer Messreihe den beobachteten Wert für
\(S_0\) oder einen größeren Wert zu
erhalten, unter der Annahme, dass das Modell zur Beschreibung der
Messung geeignet ist. Wenn diese Wahrscheinlichkeit zu klein ist, müssen
Annahmen über die Genauigkeit der Eingangsmessgrößen oder über die
Angemessenheit des Messverfahrens überdacht werden, oder die
Modellhypothese sollte angepasst bzw. verbessert werden, bevor ernsthaft
daran gedacht werden kann, gültige Werte für die Modellparameter zu
extrahieren. In der Praxis geschieht das häufig bei einem Wert von \(p_{\chi^2} < 0.05\).
Beispiel: Anstatt eines ohmschen Widerstands haben
Sie versehentlich eine Diode vermessen. Die Überprüfung des \(\chi^2\)-Wertes, also Schritt 4 aus Kap. 1,
bewahrt Sie davor, einer Halbleiterdiode einen ohmschen Widerstand
zuzuweisen!
3.4
Parameteranpassung und Bestimmung der Parameterunsicherheiten
Zur Schätzung der Parameter \(a_k\)
eines an den Stützstellen (= Messpunkten) \(x_i\) ausgewerteten Modells \(f(x_i, a_k)\) aus den Messwerten \(y_i\) wird meist die bereits oben
eingeführte Summe der Residuenquadrate \(S\) verwendet. In vielen Fällen stellt dies
die optimale Methode dar, die die kleinste Varianz der
Parameterunsicherheiten liefert. \(S\)
entspricht für gaußförmige, von den Modellparametern nicht abhängige
Unsicherheiten bis auf einen Faktor Zwei dem negativen Logarithmus der
Likelihood-Funktion, die in der mathematische Schätztheorie verwendet
wird. Allgemein schreibt man \(S\) mit
Hilfe der Inversen der oben eingeführten Kovarianz-Matrix der
Unsicherheiten der Datenpunkte,
In dieser Form wird \(S\) auch
verwendet, wenn die Messdaten korrelierte Unsicherheiten aufweisen, wenn
\(\mathbf V\) also keine Diagonalmatrix
ist.
Informationen über die Unsicherheiten der Parameter werden aus dem
Verlauf der Verteilung \(S(y_i, x_i;
a_j)\) in der Nähe des Minimums gewonnen. Das ist die Stelle im
Parameterraum, an der die Parameter ihre optimalen Werte \(\hat{a}_j\) annehmen, wie sie sich aus der
Minimierung von \(S\) bzgl. der
Parameterwerte ergeben. Dabei wird \(S\) als Funktion der Parameter \(a_j\) aufgefasst, \(S=S(a_j)\). Ein scharfes Minimum, also
große Krümmung von \(S(\hat{a}_j)\) am
Minimum oder ein schneller Anstieg in der Nähe des Minimums, entsprechen
sehr genau bestimmten Parameterwerten; ist das Minimum flacher, die
Krümmung am Minimum oder der Anstieg kleiner, ist die Unsicherheit
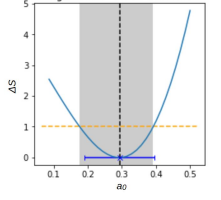
größer. Der typische Verlauf von \(S\)
am Minimum ist in der Grafik unten gezeigt.
Aus diesen Betrachtungen wird ersichtlich, dass die Unsicherheiten
mit den Krümmungen, also den zweiten Ableitungen von \(S_0\) nach den Parametern, zusammenhängen.
Für \(S\) ergibt sich:
Diese Methode wird von fast allen Anpassungsprogrammen zur Bestimmung
der Parameterunsicherheiten verwendet. Die Kehrwerte der gemischten
zweiten Ableitungen bestimmen im Falle mehrerer anzupassender Parameter
die Elemente der Kovarianzmatrix. Manche Anpassungsprogramme erlauben
es, Konfidenzkonturen von Paaren von Parametern anzuzeigen, die
vorhandene Korrelationen zwischen den Parameter anschaulich
illustrieren.
Genauer als die Bestimmung der Unsicherheiten aus den zweiten
Ableitungen am Minimum \(S_0\) ist es,
einen kompletten Scan der Umgebung des Minimums durchzuführen und die
Punkte im Parameterraum zu markieren, an denen \(S\) um den Wert Eins größer ist als am
Minimum. Mit dieser Methode können Konfidenzintervalle für die
Parameterwerte bestimmt werden, die auch Gültigkeit haben, wenn die
Verteilung der Parameterunsicherheiten nicht gaußförmig ist. Diese
Methode erlaubt die Bestimmung asymmetrischer Unsicherheiten, die
68,3%-Konfidenzintervallen für die Parameterwerte entsprechen. Einige
der weiter unten vorgeschlagenen Programmpakete verwenden diese bessere
Methode entweder als Standard oder optional.
Typischer Verlauf von \(S\) am Minimum für ein physikalisches
Modell mit einem Parameter. Eingezeichnet sind die
Parameterunsicherheiten, die sich aus den zweiten Ableitungen
(Fehlerbalken) oder aus dem Anstieg um Eins (graues Band)
ergeben.
3.4.1
Besonderheiten bei der Bestimmung der Parameterunsicherheiten
In vielen Fällen werden Anpassungen genutzt, um Parameter zu
bestimmen, ohne einen Hypothesentest durchführen zu wollen. Die
Gültigkeit des verwendeten Modells wird dann als gegeben vorausgesetzt,
d.h. \(\chi^2/N_f \,\overset{!}{=}\,1\) wird
postuliert. Diese Bedingung lässt sich erfüllen, wenn alle nach den oben
beschriebenen Verfahren bestimmten Parameterunsicherheiten mit einem
Faktor \(\sqrt{\chi^2/N_f}\) skaliert
werden. Diese Skalierung der Parameterunsicherheiten mit der Wurzel aus
dem reduzierten Chi-Quadrat \(\chi^2/N_f\) ist die Standardeinstellung in
den meisten Anpassungsprogrammen. In der Physik ist diese Vorgehensweise
sinnvoll, wenn lediglich eine Parametrisierung benötigt wird, die
gegebene Daten im Rahmen der Messunsicherheiten möglichst gut
repräsentiert. Wenn Sie allerdings eine Überprüfung der Modellhypothese
benötigen, müssen Sie unbedingt daran denken diese voreingestellte
Option abzuschalten!
3.5 Parameter mit
externen Einschränkungen
In manchen Fällen kommen in einer Modellfunktion Parameter vor, über
die Kenntnisse aus externen Messungen oder aus Hilfsmessungen vorliegen,
wie z.B. Naturkonstanten oder die Eigenschaften von Messgeräten
(Federkonstante eines Federkraftmessers, Kalibrationsfaktoren usw.). Wir
nehmen an, dass für diese Parameter \(p_k\) bereits ein Schätzwert \(p_k^0\) und eine Unsicherheit \(\sigma_{p_k}\) bekannt sind. In der
Parameteranpassung werden daher Abweichungen der Parameter von \(p_k^0\) zugelassen, indem sie mit einem
zusätzlichen Summanden in der Summe der Residuenquadrate berücksichtigt
werden:
Je weiter \(p_k\) von \(p_k^0\) abweicht, desto größer wird der
Wert von \(\tilde{S}\). Der Vorteil
dieser Methode besteht darin, dass die Unsicherheiten der extern
festgelegten Parameter bei der Bestimmung der Unsicherheiten der
interessierenden Parameter mit berücksichtigt werden. Eine händische
Fortpflanzung dieser Unsicherheiten in das Endergebnis ist bei
Verwendung dieser Methode also nicht notwendig.
Anhang
A1
Übersicht: Hilfsmittel für die physikalischen Praktika
Als Vorbereitung zum Einsatz rechnergestützter Methoden in den
Praktika wird an der Fakultät für Physik am KIT die Vorlesung
“Computergestützte Datenauswertung” mit praktischen Übungen angeboten [Link
CgDA].
Eine Programmbibliothek mit nützlichen Funktionen und Beispielen zur
Unterstützung typischer Aufgaben bei der Auslese, Visualisierung und
Auswertung von Daten in den physikalischen Praktika liefert das Paket [PhyPraKit].
Die in diesem Paket enthaltenen Beispiele können als Vorlagen für eigene
Python- Skripe zur Versuchsauswertung dienen, und daher
empfiehlt es sich, das gesamte Paket
als gepackte Datei im .zip-Format herunter zu laden.
Zur Einführung in die Grundlagen der statistischen Datenauswertung,
die Anwendung der Skript-Sprache Python und fortgeschrittene
Methoden stehen Tutorials zu den Themen “Grundlagen der Statistik” und
“Fehlerrechnung” als Jupyter-Notebooks zur Verfügung, s. [Link
Jupyter-Tutorials].
Für die Arbeit von PhysikerInnen ist die Entwicklung von Methoden zur
Lösung neuer Problemstellungen wichtig, die in der Regel die Erstellung
von eigenem Programmcode notwendig machen, weil Standard-Lösungen noch
nicht existieren. Dennoch gibt es viele immer wiederkehrende
Routineaufgaben, die durchaus mit Standard-Programmen gelöst werden
sollten.
Einige der üblichen Programmpakete setzen einfache
Programmierkenntnisse in der Sprache Python voraus. Damit wird
direkt und sehr flexibel das Programmierinterface (API = “Application
Programming Interface”) angesprochen. Dieser Zugang empfiehlt sich für
den besonders programmier-affinen Teilnehmerkreis.
Für die Durchführung von Datenauswertungen in den physikalischen
Praktika am KIT empfiehlt sich allerdings das Paket PhyPraKit
(siehe [PhyPraKit Download Link],
das vereinfachte Schnittstellen, sogenannte (“Wrapper-Funtionen”) bereit
stellt, um den notwendigen eigenen Programmcode zu minimieren. Die
Anwendung dieser Funktionen ist in zahlreichen Beispielen im Verzeichnis
PhyPraKit/examples illustriert.
Weiter enthält PhyPraKit auch einige eigenständige
Programme, die die Visualisierung von Daten und Modellen und die
Anpassung von Modellen an Messdaten ermöglichen, ohne eigenen
Python-Code zu erstellen:
Mit dem Script plotData.py lassen sich eine oder mehrere
Messreihen von Wertepaaren grafisch darstellen. Möglich ist auch die
Darstellung von Messreihen als Häufigkeitsverteilungen
(“Histogramme”).
Mit dem Script plotCSV.py können Daten in Dateien im
csv-Format direkt angezeigt werden. Das zur Trennung der Felder
verwendet Separator-Zeichen (voreingestellt ist ‘,’) oder die Zahl der
Kopfzeilen (Vorgabe ist 1) können als Option angegeben werden.
Das Script run_phyFit.py dient dazu, Anpassungen von
Modellen an Messreihen von Wertepaaren durchzuführen; die Daten und das
Modell werden dabei aus einer in der einfachen Datenbeschreibungssprache
yaml erstellen Text-Datei gelesen.
Das Scritpt csv2yaml.py erlaubt die Konversion von
Eingabedaten im häufig verwendeten csv-Format in einen gültigen
Ausdruck in der Datenbeschreibungssprache yaml, die von den
Programmen oben zur Dateneingabe verwendet wird. Auch das
Windows-Programm Excel oder machen in den Praktika verwendeten Programme
zur Auslese von Geräten von Lehrmittelfirmen unterstützen das
csv-Format. Bei Verwendung einer deutschen
Betriebssystemversion werden Daten allerdings als deutsche Dezimalzahl.
also mit ‘,’ anstelle von ‘.’, abgespeichert, und deshalb erledigt diese
Script auch die ggf. notwendige Umwandlung, um mit wissenschaftlichen
Pakten zur Datenauswertung kompatibel zu sein.
Das Script kafe2go aus dem Paket kafe2 dient (wie
auch run_phyFit) zur Anpassung von Modellen an Daten, bei denen
die gesamte Anpassung basierend auf einer yamlDatei
durchgeführt wird. kafe2go ist sehr viel funktionsreicher als
run_phyFit.py, das Datenformat ist aber kompatibel.
Es gibt viele weitere Werkzeuge, mit denen sich typische Aufgaben der
Darstellung und Auswertung von Daten bewerkstelligen lassen. Nicht alle
davon können flexibel genug mit den typischen Unsicherheiten bei
physikalischen Messungen umgehen, oder die Standardeinstellungen
erlauben es nicht, die Gültigkeit der angenommenen Modellhypothese zu
überprüfen. Auch die strikte Interpretation der ausgegebenen
Parameterunsicherheiten als Konfidenzbereich ist nicht in jedem Fall
gegeben. Es ist also erforderlich, die jeweiligen Optionen anzupassen,
um nachvollziehbare und zu den üblichen Anforderungen in der Physik
konforme Ergebnisse zu erhalten.
A2 Empfehlungen
zur praktischen Vorgehensweise
Zur Durchführung der mit Computerunterstütung vergesehenen Arbeiten
in den Praktika wird Ihnen im Normalfall eine über einen beliebigen
Web-Browser zugängliche Arbeitsumgebung bereit gestellt. Dazu werden
üblicherweise sogenannte Jupyter-Notebooks (s. weiter unten) genutzt,
die die Programmiersprache Python voraussetzen.
Es ist allerdings auch kein Problem, eine entsprechende Umgebung auf
Ihren eigenen Computer aufzusetzen. Ob Sie einen Jupyter-Server auf
Ihrem eigenen System oder auf einem Server des entsprechenden Kurses
nutzen, macht zwar kaum einen Unterschied; auf Ihrem eigenen System sind
Sie aber flexibler, arbeiten stets in der gleichen gewohnten Umgebung
und können von Ihnen erstellten Programmcode leichter auf andere
Projekte übertragen.
A2.1 Arbeitsumgebung auf
dem Computer
Es gibt für die verschiedenen Computer-Plattformen (Microsoft
Windows, Apple OS, Linux oder Chromebook) eine schier unüberschaubare
Anzahl von verschiedenen Applikationen zur Datenvisualisierung und
-analyse, die mit einer ebenso kaum überschaubaren Anzahl an Optionen
und mit bisweilen sehr komplexen Nutzeroberflächen eine Vielzahl von
Anwendungsfällen abzudecken versuchen.
In der wissenschaftlichen Datenanalyse haben sich frei zugängliche
und kostenlos verfügbare Lösungen etabliert. Insbesondere das neue
Gebiet “Data Science” setzt dabei auf die Sprache Python, die
als interpretierte Sprache einerseits einen schnellen Entwicklungszyklus
von Code zur spezialisierten Datenanalyse bietet, andererseits aber auch
mächtige, hochperformante Bibliotheken zur numerischen Datenverarbeitung
mitbringt.
Da es die Programmiersprache Python auf allen verbreiteten
Plattformen und sogar auf Einplatinencomputern gibt, ist es sinnvoll,
auch für die Datenauswertung in den Praktika zur Physik auf Lösungen in
Python zu setzen. Auf Windows- und neueren Apple-Systemen ist
Python leider nicht standardmäßig vorhanden und muss erst noch
installiert werden. Dazu werden in den AppStores entsprechende Pakete
angeboten. Wenn Python installiert und die Hilfsprogramme im
Pfad der ausführbaren Programme aufgeführt sind, ist die Vorgehensweise
aber immer gleich.
In Python geschriebene Programme werden üblicherweise über
die Kommandozeile gestartet; auch die Installation und Konfiguration von
Programmpaketen erfolgt über die Kommandozeile. Nach der Installation
von Python sollten Sie zunächst einige der wichtigsten
Programme und Pakete installieren. Dies erledigen Sie über den Package
Installer pip (bzw. pip3 bei Systemen, auf
denen auch noch die ältere Version 2.7 von Python installiert ist).
Geben Sie zur Installation der zusätzlich benötigten Pakete
nacheinander folgende Befehle ein:
> pip3 install kafe2
> pip3 install PhyPraKit
kafe2 ist ein flexibles Paket zur Anpassung von
Modellen an Messdaten.
PhyPraKit ist das oben schon erwähnte Paket mit
Beispielen für konkrete Anwendungen in den Praktika.
Bei Installation von kafe2 werden automatisch wichtige
Pakete mitinstalliert.
numpy ist eine mächtige Bibliothek zur Durchführung
effizienter Berechnungen von mathematischen Funktionen auf großen
Datenmengen.
matplotlib ist eine Bibliothek zur Erstellung
ansprechender Grafiken zur Visualisierung von Daten.
iminuit ist ein Paket zur numerischen Minimierung einer
Kostenfunktion und zur Analyse der Unsicherheiten, das von den
Anpassungen in kafe2 und PhyPraKit verwendet
wird.
Jupyter Notebooks
Wenn Sie als Umgebung zur Ausführung von Python-Code Jupyter
Notebooks ausprobieren möchten, installieren sie noch:
> pip3 install jupyterlab
Die Jupyter-Umgebung wird auf allen Systemen gestartet durch Eingabe
von
> jupyerlab
beziehungsweise über Python mit dem Befehl
> python -m jupyerlab .
Dies startet einen lokalen Web-Server, mit dem sich normalerweise ein
automatisch startender Web-Browser verbindet. Sie können nun Beispiele
mit der Dateiendung ipynb ausführen und modifizieren oder auch
eigenen Python-Code eingeben und ausführen. Die Browser-Oberfläche
fungiert dabei als komplette Entwicklungsumgebung, in der Code,
Dokumentation und Programmausgaben in Textform oder auch grafisch
ausgegeben werden.
Weitere nützliche Programme sind das Textsatz-Programm LaTeX
und das Paket pandoc, mit denen sich Dokumentation und auch
Praktikumsprotokolle erstellen lassen. Auf vielen Systemen ist die
LaTeX-Version TexLife installiert; für MS Windows
empfiehlt sich wegen der einfacheren Installation die Variante
MiKTeX, die neben einer ganzen Anzahl an nützlichen
Hilfsprogrammen und einem Kommandozeilen-Interface auch eine grafische
Oberfläche texworks zur Erzeugung und Darstellung von
Dokumenten mitbringt.
Das Paket pandoc ermöglicht es, Dokumente in der
leichtgewichtigen und von Menschen gut lesbaren “Markdown”-Sprache zur
verfassen; Ausdrücke in LaTeX werden dann nur für Formeln
benötigt. Anmerkung: Dieses Dokument wurde in Markdown erstellt
und mit Hilfe von pandoc ins pdf-Format
umgewandelt.
Beispiele und Programme aus PhyPraKit
Sie sollten zusätzlich noch die Beispiele und Programme aus dem Paket
PhyPraKit herunter laden. Diese finden Sie unter dem Link: [PhyPraKit].
Verwenden Sie das Download-Symbol und kopieren Sie alle Dateien im
gitlab-Repository als zip-Datei herunter. Entpacken
sie alles in ein Verzeichnis mit einem aussagekräftigen Namen, z.B.
Praktikum/PhyPraKit. Im Verzeichnis
PhyPraKit/docs finden Sie die Datei
PhyPraKit.pdf mit einer ausführlichen Dokumentation aller
enthaltenen Module und der Beispiele im Verzeichnis PhyPraKit/examples bzw. der Jupyter-Notebooks in
PhyPraKit/ipynb_examples/.
PhyPraKit enthält die oben bereits erwähnten Programme,
die Standardaufgaben auch ohne die Erstellung von eigenem Programmcode
lösen. Für die meisten Aufgaben sind diese Standard-Programme
ausreichend; für den einzelnen Anwendungsfall angepasst werden müssen
nur die Daten und Metadaten in der Eingabedatei im
yaml-Format.
Für komplexere Aufgaben gibt es Beispiele in Python, die als
Vorlage zur Anpassung für ähnliche Aufgabenstellungen gedacht sind. Zur
direkten Anwendung der API der Programmpakete kafe2 oder
PhyPraKit.phyFit studieren Sie am besten den Code der in den
Beispielen aufgerufenen Wrapper-Funktionen, oder Sie nutzen die
entsprechenden API-Dokumentationen.
A2.1 Digitale Datenformate
Bei Verwendung von vorgegebenen Programmen müssen Daten in den von
diesen unterstützten Formaten vorliegen. Ein sehr einfaches, weit
verbreitetes Format ist dabei das csv-Format
(comma bzw. character
separated values), bei dem die Daten
in Zeilen vorliegen und die einzelnen Datenwerte in einer Zeile durch
Kommata oder häufig auch andere Zeichen (Tabulator, Leerzeichen, ;)
getrennt werden. Damit lässt sich z.B. eine Tabelle gut abbilden:
a
b
c
1
2
3
4
5
6
die als csv-Datei dargestellt so aussieht:
a,b,c
1,2,3
4,5,6
Es ist möglich, Daten in diesem Format in eine Excel-Tabelle
einzulesen oder auch Excel-Daten in diesem Format zu exportieren.
Leider bietet dieses einfache Format keine Möglichkeit, komplexere
Datenstrukturen oder die ebenfalls benötigten Metadaten darzustellen.
Für die Programmpakete in PhyPraKit und kafe2 wurde
deshalb als Datenformat die einfache Datenbeschreibungssprache
yaml gewählt. Unsere Tabelle sieht in diesem Format so
aus:
a: [1,4]
b: [2,5]
c: [3,6]
Der Vorteil ist, dass weitere Schlüssel hinzugefügt werden können, um
zusätzliche Information anzugeben. Auch vom einlesenden Programm nicht
ausgewertete, durch das Zeichen # eingeleitete
Kommentarzeilen sind möglich:
# Beispiel einer Datei im yaml-Format
Datentyp: "Einfache Tabelle"
Datum: 11.11.2011
a: [1,4]
b: [2,5]
c: [3,6]
Eingelesen in ein Programm entspricht die Datenstruktur der eines
sogenannten “Dictionaries”, d.h. eines “assoziativen Feldes”, bei dem
Datenstrukturen mit einem Text oder einer Zahl als Schlüssel indiziert
werden. Die vom yaml-Format unterstützten Kommentarzeilen
werden zwar beim Einlesen ignoriert, sind aber zur Strukturierung der
Daten und zur Dokumentation von Optionen für den Ersteller oder Leser
der Datei extrem hilfreich.
In unserem Beispiel sind die Datenstrukturen Listen aus Zahlen, Text
oder ein Datum. Es wäre auch möglich, eine ganze Tabelle mit ihren
Metadaten als eigene Datenstruktur einzubinden, oder auch viele Tabellen
mit ganz unterschiedlicher Bedeutung in einem Dokument zu vereinen.
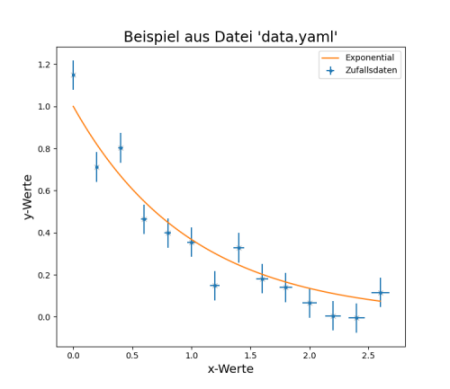
Ein weiteres Beispiel für Messdaten mit Unsicherheiten und einer als
Python-Code dargestellten Funktion veranschaulicht die Relevanz für
typische Problemstellungen im Praktikum:
Mit Hilfe des Programms plotData.py und dem Aufruf > python3 plotData.py data.ydat
wird dann daraus die unten gezeigte grafische Ausgabe erzeugt.
Das Programm plotData.py ist auch bei der händischen
Datenerfassung sehr nützlich, weil damit ohne viel Aufwand eine
grafische Überprüfung der Daten schon während der Datenaufnahme möglich
ist.
Die Programme PhyPraKit/examples/run_phyfit.py und
kafe2go aus dem Paket kafe2 nutzen das gleiche
Eingabeformat zur Durchführung von Anpassungen der Modellparameter an
die Messdaten.
Hinweis: Daten aus üblichen Programmen wie
LibreOffice oder MS Office oder auch von manchen
Geräten wie Datenloggern oder Oszilloskopen werden im
csv-Format ausgegeben. Zur Konversion in einen
yaml-Block gibt es in PhyPraKit das Script
csv2yml.py.
A2.2
Bestimmung der Unsicherheiten von Messdaten
Wie bereits eingangs erläutert, ist es für die Interpretation von
Messergebnissen in der Physik essentiell, die Messunsicherheiten zu
kennen.
Durch wiederholte Messung lassen sich zufällige (also statistische)
Einflüsse quantifizieren.
Abweichungen oder Unzulänglichkeiten des Messgeräts oder der
Messmethode, sogenannte systematische Unsicherheiten, lassen sich auf
diese Weise aber nicht bestimmen, sondern dazu muss auf Angaben des
Herstellers oder des Urhebers des Messverfahrens zurück gegriffen
werden.
A2.2.1 Wiederholte Messung zur Bestimmung
statistischer Unsicherheiten
Um die Unsicherheiten von Messungen abzuschätzen, kann man die
gleiche Größe mehrmals unabhängig messen, z.B. von mehreren Personen,
oder durch möglichst unabhängige Wiederholung der gesamten Messprozedur
inklusive der Neuausrichtung bzw. Neuverbindung des Messgeräts. Aus der
Standardabweichung der Messwerte ergibt sich dann der Wert für die
Unsicherheit einer Einzelmessung. Für diese Vorgehensweise gibt es ein
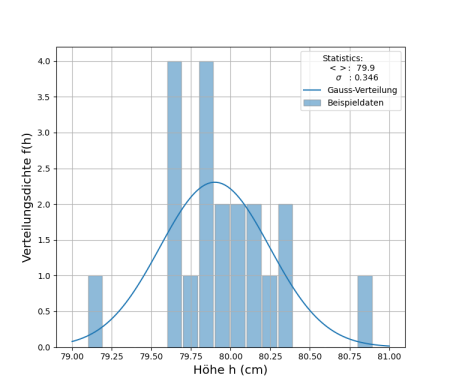
vom Programm plotData.py unterstütztes Datenformat zur
Erstellung von Häufigkeitsverteilungen und zur Berechnung der
statistischen Daten, wie im folgenden Beispiel gezeigt:
# hData.ydat: Beispiel einer Histogramm-Darstellung
# -------------------------------------------------
type: histogram
title: "Wiederholte Messungen von Tischhöhen"
label: Beispieldaten
x_label: 'Höhe h (cm)'
y_label: 'Verteilungsdichte f(h)'
# Daten:
raw_data: [
79.83,79.63,79.68,79.82,80.81,79.97,79.68,80.32,79.69,79.18,
80.04,79.80,79.98,80.15,79.77,80.30,80.18,80.25,79.88,80.02 ]
n_bins: 20
bin_range: [79., 81.]
# alternatively an array for the bin edges can be specified
#bin_edges: [79., 79.5, 80, 80.5, 81.]
model_label: Gauss-Verteilung
model_density_function: |
def normal_distribution(x, mu=79.9, sigma=0.346):
return np.exp(-0.5 *((x-mu)/sigma)**2)/np.sqrt(2.*np.pi*sigma**2)
Die Ausgabe enthält auch die Angabe von Mittelwert und
Standardabweichung der eingegebenen Daten. Die eingezeichnete Funktion
repräsentiert die Verteilungsdichte, die zur Berücksichtigung der
Bin-Breite im Histogramm und der Anzahl der Einträge entsprechend
skaliert wurde. Die in der Eingabedatei anzugebende Verteilungsdichte
ist dagegen auf die Fläche von Eins normiert.
A2.2.2 Apparative Unsicherheiten
Alle Messgeräte haben eine endliche Genauigkeit, die typischerweise
im jeweiligen Datenblatt angegeben ist. Solche auf das Messgerät oder
die Messmethode zurück zu führende “systematische Unsicherheiten”
betreffen alle aufgenommenen Messwerte in gleicher Weise und lassen sich
durch Mehrfachmessungen auch nicht verringern.
Wenn mehrere Messgeräte des gleichen Typs vorhanden sind, kann man
allerdings die Methode aus 5.2.1 anwenden und die Unsicherheiten aus der
Streuung der mit verschiedenen Geräten der gleichen Serie erhaltenen
Messergebnisse bestimmen. Die systematische Unsicherheit ist damit auf
eine statistische Unsicherheit zurückgeführt.
Beispiel: Die Genauigkeit von digitalen Messgeräten
wird typischerweise in der Form “\(\pm\) x% + y digits” angegeben. Die erste
Unsicherheit ist dabei die Kalibrationsunsicherheit des Geräts; dies ist
eine relative, auf den wahren Wert bezogene Unsicherheit, die alle
Messungen in gleicher Weise betrifft, etwa so wie ein zu langer oder zu
kurzer Maßstab bei Längenmessungen. Die zweite Größe ist die
statistische Unsicherheit jeder Einzelmessung, angegeben in Abweichungen
der letzten Ziffer der Anzeige. In der Praxis kommen dazu noch
statistische Unsicherheiten durch Rauschen, das über die Messleitungen
und den Aufbau eingestreut wird, oder Übergangswiderstände an der
Kontaktstelle.
Da sich Unsicherheiten quadratisch addieren, d.h. \({\sigma_{\rm tot}}^2 = \sqrt{\sum_i
\sigma_i^2}\) gilt, können häufig die kleinsten Unsicherheiten
vernachlässigt werden. In der Praxis dominiert oft das als statistisch
anzusehende Rauschen. Wenn aber die relative, auf den wahren Wert
bezogene Unsicherheit dominiert, müssen Verfahren angewandt werden, die
korrelierte, relative Unsicherheiten korrekt berücksichtigen können.
Die Berücksichtigung von allen oder mehreren Messwerten gemeinsamen
Unsicherheiten benötigt entweder die Einführung der Kovarianzmatrix
aller Messunsicherheiten, wie es in den Paketen kafe2 und
PhyPraKit/phyFit vorgesehen ist. Man kann das Problem in
einfache Fällen aber auch durch Iteration lösen, indem man mehrere
Datenauswertungen mit jeweils um die gemeinsamen Unsicherheiten
verschobenen Messwerten durchführt und die sich ergebenden Abweichungen
der erhaltenen Ergebnisse als jeweilige Unsicherheit verwendet. Am Ende
ergibt sich die Gesamtunsicherheit als die Wurzel der Summe aller so
ermittelten, quadrierten Unsicherheiten.
A2.3 Einfache
Durchführung von Modellanpassungen
Die Grundlagen der Anpassung von Modellen an Messdaten sind in der
Literatur und in den oben bereits erwähnten Skripten und
Jupyter-Tutorials ausführlich beschrieben.
Vor allem die vielfältigen Methoden zur analytischen Behandlungen von
linearen, quadratischen oder nicht-linearen Regression lassen das Thema
unnötig komplex erscheinen. Im wesentlichen geht es lediglich darum, ein
geeignetes Abstandsmaß zwischen einer Modellfunktion \(f()\) und einer Anzahl von \(N\) mit Unsicherheiten behafteten Messdaten
\(y_i\) bezüglich der Parameter \(a_k\) zu minimieren:
Eine ganz einfache Lösungsmethode besteht schon darin, den Abstand
\(D\) als Funktion der Parameter
grafisch darzustellen und dann das Minimum zu suchen. Dazu ist kein
ausgefeilter Algorithmus notwendig, sondern es reichen einige Zeilen
Python Code.
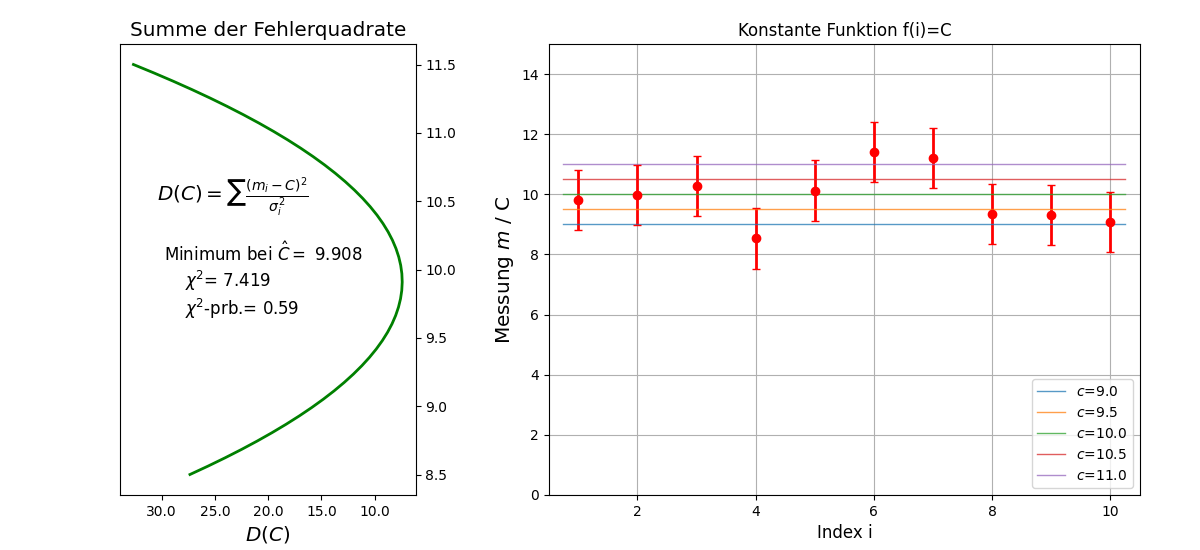
Als Beispiel zeigt die rechte Seite der Grafik unten 10 Messwerte
\(m_1, ..., m_{10}\) und einige
konstante Funktionen. Welche davon passt am besten zu den Daten?
Um eine quantitative Antwort zu finden, wählen wir die Summer der
Residuenquadrate als Abstandsmaß \(D(C)=S(C)\); aufgefasst als Funktion des
Parameters C ergibt sich die Gleichung einer Parabel:
Das Abstandsmaß als Funktion von \(C\) ist im linken Teil der Grafik
dargestellt. Die Parabelform und auch die Position des Minimums \(\hat{C}\) sind klar sichtbar. Der Wert von
\(\chi^2=D(\hat{C})\) und die sich
daraus ergebende \(\chi^2\)-Wahrscheinlichkeit sind ebenfalls
angegeben.
In der rechten Grafik sind 10 Messwerte
und 5 mögliche konstante Funktionen gezeigt. Der Wert des Abstandsmaßes
für verschiedene Werte der Konstanten ist links
dargestellt.
Übrigens entspricht der so bestimmte Wert von \(\hat{C}\) dem Mittelwert der Messwerte.
Dies kann man leicht durch analytische Bestimmung des Minimums von \(D(C)\) verifizieren.
Auch bei komplizierterem Verlauf der Funktion \(f(x_i; a_k)\) bleibt die numerische
Herangehensweise die gleiche - im Ausdruck für D wird lediglich \(C\) durch \(f(x_i; a_k)\) ersetzt. Wir können das
Anpassungsproblem also durch Verwendung eines einfachen
Funktionen-Plotters lösen, indem man \(D(a_k)\) grafisch darstellt.
Das skizzierte Verfahren funktioniert noch gut mit zwei Parametern,
bei drei und mehr wird es numerisch sehr ineffizient; dann setzt man
spezielle Algorithmen der numerischen Optimierung ein, um das Optimum
bezüglich aller \(n_p\) Parameter mit
möglichst wenigen Funktionsauswertungen zu finden. Diese Algorithmen
sind in Programmpaketen implementiert, die im Folgenden besprochen
werden. Sie übernehmen auch die zur Bestimmung der Unsicherheiten
notwendige Analyse des Verlaufs des Abstandmaßes in der Nähe des
Minimums und optional die grafische Darstellung der Ergebnisse.
A2.3.1 Praktische Werkzeuge zur
Funktionsanpassung
Ähnlich wie zur Darstellung von Messdaten gibt es fertige
Python-Programme, die Anpassungen an Daten ausführen und die
auf die Anforderungen in den physikalischen Praktika ausgerichtet sind.
Eines davon ist kafe2go, ein anderes run_phyFit.py aus
dem Paket PhyPraKit. Beide Programme nutzen (kompatible) Eingabedaten im
yaml-Format. kafe2go bietet mehr Möglichkeiten an als
das einfacher gehaltene run_phyFit.py.
Wir können die Eingabe aus der Beispieldatei von oben verwenden,
geben diesmal aber ein:
python3 run_phyFit.py data.ydat
oder
kafe2go data.ydat` .
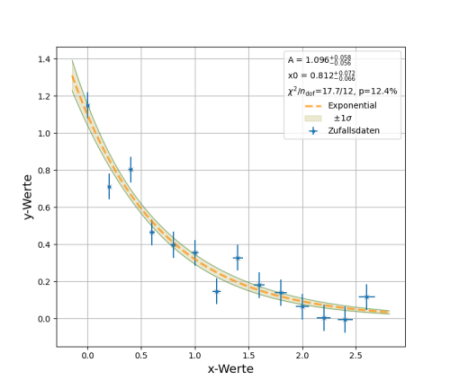
Anstatt die Modellfunktion einfach nur grafisch darzustellen, wird
nun eine Anpassung durchgeführt, und in der Grafik und auf der
Textkonsole werden die besten Parameterwerte, deren Unsicherheiten und
die \(\chi^2\)-Wahrscheinlichkeit
ausgegeben. Das Ergebnis ist in der Grafik unten dargestellt. Zusätzlich
wird noch ein schattiertes Band um die Funktion herum angezeigt, das den
Unsicherheitsbereich der Funktionsvorhersage wiedergibt und mittels
Fehlerfortpflanzung aus den Parameterunsicherheiten berechnet wird.
Anpassung einer Exponentialfunktion an
Messdaten mit run_phyFit.py
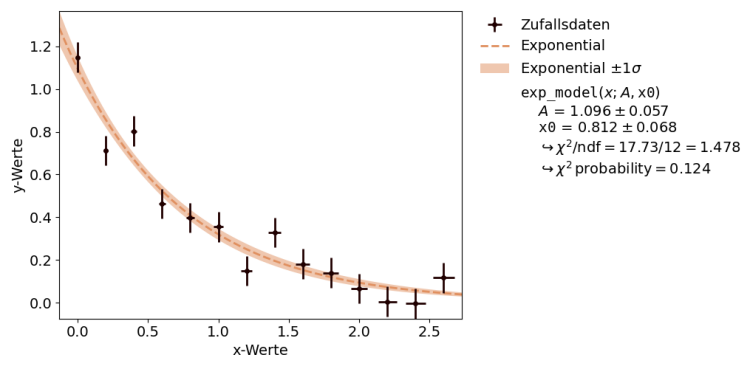
Die Ergebnis mit kafe2go ist identisch, wie in der folgenden
Grafik gezeigt.
Anpassung einer Exponentialfunktion an
Messdaten mit kafe2go
A2.3.2 Komplexere Unsicherheiten
Die große Stärke der Pakte kafe2 und phyFit ist
deren Fähigkeit, mit komplexen Arten von Unsicherheiten umgehen zu
können. Solche Unsicherheiten betreffen die \(x-\) und/oder \(y\)-Werte, sie können unabhängig
voneinander oder korreliert, relativ oder absolut sein. Korrelierte
Unsicherheiten betreffen gegebenenfalls nur Untergruppen der Daten, z.B.
jeweils in gleichen Messbereichen eines Multimeters gemessene Ströme
oder Spannungen. Solche Szenarien lassen sich mit den Programmen korrekt
abbilden. Die Struktur der Unsicherheiten kann in yaml
abgebildet werden und sieht ganz allgemein so aus:
# general structure of error block
y_errors: ( OR x_errors:)
- error_value: <float> OR <[list of floats]>
correlated: 0. OR 1.
relative: false OR true
# possibly, add more kinds of uncertainties ...
- error_value ...
...
Für kafe2go können von solchen Arten von Unsicherheiten
beliebig viele angegeben werden, die dann in einer gemeinsamen
Kovarianzmatrix aller Unsicherheiten zusammengefasst werden. In
phyFit wird momentan nur eine Angabe pro Unsicherheits-Typ
unterstützt.
Für relative Unsicherheiten, die auf den Modellwert bezogen werden,
oder für Unsicherheiten in \(x\)-Richtung, die unter Annahme des Modells
per Taylor-Entwicklung auf Unsicherheiten in \(y\)-Richtung transformiert werden, muss
diese Matrix in jedem Schritt der numerischen Optimierung neu berechnet
werden. Das ist zwar ein sehr aufwändiges Verfahren, auf modernen
Laptops aber überhaupt kein Problem. Einige auch komplexere Beispiele
sind im Verzeichnis examples/ im Paket PhyPraKit
enthalten und können als Basis zur Lösung von eigenen
Anpassungsproblemen dienen.
Auch durch externe Kenntnisse eingeschränkte Parameter, wie in 3.5
beschrieben, können mit diesen Werkzeugen behandelt werden. Der
entsprechende Eintrag in der yaml-Datei sieht so aus:
Viele der gängigen Programme zur Funktionsanpassung unterstützen
keine Unsicherheiten in \(x\)-Richtung
oder korrelierte Unsicherheiten. Bei deren Verwendung muss dann auf
andere Verfahren zurückgegriffen werden, die lediglich einfache
Anpassungen nur unter Berücksichtigung der statistisch unabhängigen
Unsicherheiten in \(y\)-Richtung
erfordern. Eventuell vorhandene weitere korrelierte Unsicherheiten,
relative Unsicherheiten und/oder Unsicherheiten in \(x\)-Richtung werden dann in nachfolgenden
Schritten hinzugefügt, indem man die Unsicherheiten in \(y\)-Richtung neu berechnet und die
Anpassung ggf. mehrfach wiederholt.
Solche Verfahren, wie sie unten kurz skizziert sind, waren auch
üblich, als Computer noch weniger leistungsfähig waren; sie werden auch
heute noch eingesetzt, wenn die Berechnung der Modellfunktion sehr
aufwändig ist.
a) Behandlung von Unsicherheiten in \(x\)-Richtung
Unsicherheiten der Datenpunkte bzgl. der Abszissenachse, d.h. der
\(x_i\), können folgendermaßen
berücksichtigt werden:
zunächst erfolgt eine Anpassung ohne Berücksichtigung der
Unsicherheiten der Abszissenwerte;
im einem zweiten Schritt werden diese dann mit Hilfe der ersten
Ableitungen \(f'(x_i)\) der im
ersten Schritt angepassten Funktion \(f\) in entsprechende Unsicherheiten in
\(y\)-Richtung umgerechnet und
quadratisch zu den bereits vorhandenen Unsicherheiten in \(y\) addiert: \({\sigma_i}^2={\sigma_y}_i^2
\,+\,(f'(x_i) \cdot {\sigma_x}_i)^2 \,\). Mit diesen
modifizierten Unsicherheiten wird die Residuensumme \(S\) minimiert.
Ein dritter Schritt, der der Vorgehensweise beim zweiten Schritt
entspricht, dient zur Verbesserung des Ergebnisses und zur
Fehlerkontrolle - der Wert \(S_0\) am
Minimum darf sich vom zweiten zum dritten Schritt nicht signifikant
ändern, ansonsten muss nochmals iteriert werden.
b) Behandlung von Parametern mit externen
Einschränkungen
Modellparameter, die durch externes Wissen im Rahmen ihrer
(gaußförmigen) Unsicherheiten eingeschränkt sind, lassen auch mit einem
Anpassungswerkzeug ohne die Möglichkeit zur Berücksichtigung von
Constraints (s. 3.5) behandeln, indem man Anpassungen mit jeweils um
\(\pm\sigma_{p_k}\) veränderten Werten
des betreffenden Parameters \(p_k\)
durchführt. Dabei verändern sich natürlich die Werte der angepassten
Parameter um \(\Delta_j^\pm\). Um
symmetrische Unsicherheiten zu erhalten, mittelt man beide Werte und
erhält so den Wert der systematischen Unsicherheit \(\Delta_j = (\Delta_j^+ + \Delta_j^-)/2\),
den man quadratisch zur ursprünglichen Parameterunsicherheit \(\sigma_j^0\) addiert:
Korrelierte Unsicherheiten \(\sigma_i^c\) der Datenpunkte können
berücksichtigt werden, indem man sie in der Anpassung zunächst
vernachlässigt und in vor einer weiteren Anpassung zu den Datenpunkten
addiert bzw. davon subtrahiert:
\(y_i' = y_i \pm \sigma_i^c\,\)
bzw.
\(x_i' = x_i \pm \sigma_i^c\,\)
im Fall von Unsicherheiten in \(x\)-Richtung.
Die nach wiederholten Anpassungen gemittelten Änderungen \(\Delta_j\) der interessierenden Parameter
\(a_j\) addiert man wie im Fall b)
quadratisch zu den ursprünglichen Parameterunsicherheiten \(\sigma_{a_j}\).
Wenn das verwendete Anpassungswerkzeug die Berücksichtigung
eingeschränkter Parameter erlaubt, kann man korrelierte Unsicherheiten
auch als Verschiebung \(o=0\) bzw. als
als Skalierungsfaktor \(s=1\) mit
Unsicherheiten \(\sigma_o\) bzw. \(\sigma_s\) auffassen und im Modell \(f(x_i)\) durch \(o + s \cdot f(x_i)\) bzw. \(f(o + s \cdot x_i)\) im Fall von
Unsicherheiten in \(x\)-Richtung
ersetzen. Die Unsicherheiten bzgl. Verschiebung oder Skalierung werden
so korrekt auf die Parameterunsicherheiten propagiert.
d) Behandlung von relativen Unsicherheiten
Wenn Unsicherheiten von den Messwerten selbst oder von den
Modellparametern abhängen, also z.B. auf den wahren Wert bezogenen
relative Unsicherheiten oder auch statistische Unsicherheiten in
Zählexperimenten, sind die Grenzen der Methode der kleinsten
Fehlerquadrate erreicht. In solchen Fällen müssen zur Vermeidung von
Verzerrungen die Unsicherheiten in jedem Schritt der Minimierung neu auf
Grund der jeweils aktuellen Parameterwerte berechnet werden.
Man kann relative Unsicherheiten zunächst auf die gemessenen Werte
beziehen und eine erste Anpassung durchführen. Dann werden für einen
zweiten Schritt die Unsicherheiten auf Grund der nun näherungsweise
bekannten Modellwerte erneut berechnet und die endgültige Anpassung
durchgeführt, aus der man die finalen Parameterunsicherheiten
entnimmt.
A3: Arbeiten mit Jupyter
Notebooks
Das quelloffene Projekt Jupyter bietet eine
Web-basierte interaktive Umgebung für wissenschaftliche Berechnungen und
Datenauswertung Die zu Grunde liegenden Dateien sind sogenannte
„Notebooks“, die sowohl formatierten Text als auch Programmcode u.a. in
der Sprache Python und die entsprechende Programmausgabe in
Form von Text und Grafiken in einem einzigen Dokument vom Typ
.ipynb speichern.
Grundlage der Texteingabe und -formatierung bildet das oben schon
erwähnte, von Menschen und Maschinen gut zu lesende
Markdown-Format. Bei diesem modernen Konzept dient ein
beliebiger Web-Browser als grafisches Interface zu einem Jupyter-Server,
der entweder im Netzwerk oder auch lokal auf dem gleichen Computer
laufen kann. Die Installation eines lokalen Jupyter-Sververs
als Möglichkeit einer Umgebung zur Datenauswertung wurde bereits oben in
Kap. 4. besprochen. Damit lassen sich die Vorgaben zur Dokumentation von
Messwerten und der damit durchgeführten Analysen inklusive des
verwendeten Programmcodes vollständig nachvollziehbar und reproduzierbar
dokumentieren.
Die Fakultät für Physik betreibt einen Jupyter-Server, der
Studierenden zur Verfügung steht. Informationen dazu findet man in den
einführenden [Tutorials
zur Nutzung von Jupyter Notebooks]. Dieser Server ermöglicht
Datenauswertungen ohne die Notwendigkeit der Installation eigener
Software. Eine Jupyter Testumgebung auch ohne Zugang zum Server
der Fakultät wird auf der [Homepage des Autors]
bereit gestellt. Dort finden sich auch eine Reihe an grundlegenden und
weiter führenden Tutorials zur Anwendung der Jupyter-Umgebung,
zur Einführung in die Grundlagen der Statistik und Fehlerrechnung sowie
zu fortgeschritteneren Themen wie die Nutzung des Programmierinterfaces
von kafe2, zur Maximum-Likelihood-Methode und zum modernen
Datenverwaltungs- und -analyse-Werkzeug pandas.
Kenntnisse der Sprache Python und die sehr komfortable
Jupyter-Umgebung bilden heute die Grundlage für die
wissenschaftliche Datenauswertung in vielen Disziplinen. In den
Veranstaltungen zu den Grundlagen der Rechnernutzung und der
computergestützten Datenauswertung wurden Jupyter Notebooks als
Entwicklungsumgebung für Python-Programme bereits
eingeführt.
Die gut strukturierte Oberfläche ist intuitiv erlernbar. In den Praktika
werden überdies Vorlagen bereit gestellt, die die Versuchsanleitungen
sowie notwendige Hilfsmittel wie Formeln, fertige Programme oder
auch
Code-Fragmente schon enthalten.
Jupyter-Notebook
mit stand-alone Programmen zur Datenauswertung
An dieser Stelle möchten wir explizit auf das Jupyter-Notebook
tutorial_StandAloneTools aus dem Paket PhyPraKit
verweisen, das Sie im Verzeichnis PhypraKit/ipynb_examples
finden.
Es enthält einige Beispiele, die Darstellung und Auswertung von Daten
auch ohne eigenen Programmcode mit Hilfe der in A1 c)
beschriebenen Programme plotData.py, kafe2go.py oder
run_phyFit.py bewerkstelligen. Die Eingabedaten werden dazu in
Textdateien im ebenfalls oben beschriebenen yaml-Format bereit
gestellt. Als Namenskonvention wurden die Endungen .ydat für
Daten und .yfit für Eingabedateien gewählt.
Die in diesem Tutorial beschriebenen Methoden und Vorgehensweisen
bilden die Grundlage für die Datenauswertung und Dokumentation im
Physikalischen Anfängerpraktikum.
A4: Tipps für MS Windows
A4.1. Wichtige
Befehle für die Kommandozeile
Anmerkung: Bitte die Windows Konsole und nicht die
neuere PowerShell benutzten, da letztere ggf. einige
zusätzliche Konfigurationen erfordert, um die hier vorausgesetzte
Verhaltensweise zu erzeugen!
Tipp: Starten Sie am Besten die Windows Konsole und
probieren Sie die Bespiele gleich aus !
Befehle für Windows Eingabeaufforderung:
cd <Ordnerpfad> (= change directory): in anderes
Verzeichnis wechseln
cd .. ins Verzeichnis darüber wechseln
dir zeigt eine Liste der Dateien und Ordner
move <Quelldatei> <Zielordner> verschieben
von Dateien
copy <Quelldatei(-Pfad)> <Zielordner>
Kopieren von Dateien
md <Ordnername> Erzeugen eines neuen Ordners
rd <Ordnername/-pfad> Löschen eines (leeren)
Ordners
type <Dateiname> Ausgabe einer Text-Datei auf
Bildschirm
Windows-Programme lassen sich ebenfalls bequem von der Kommandozeile
aus starten:
notepad <Dateiname> startet den Texteditor
ìdle <Dateiname> startet die einfache
Python-Umgebung idle
pip install <Paketname> installiert ein
Python-Paket
pip install --upgrade <Paketname> dient zu
Aktualisierung von Python-Paketen
pip install --upgrade --pre <Paketname>
berücksichtigt auch Vorabversionen bei der Aktualisierung
<name>.py [parameter] startet ein
Python-Programm mit dem angegebenen Parameter, wenn die
Verknüpfung von Dateien mit der Endung .py mit
Python.exe hergestellt und sich das Python-Skript im
Windows-Suchpfad für ausführbare Programme befindet (s. unten)
pdflatex <name>.tex erzeugt eine Ausgabedatei im
pdf-Format aus einer LaTeX-Datei
pandoc <name.md> -o <output-name>.pdf
erzeugt eine Ausgabedatei im pdf-Format aus einer Datei im
Markdown-Format
A4.2. Installation
von Python unter Windows
Python für Windows installiert man am besten direkt von der Homepage der Python Foundation. Die
jeweils aktuellste sowie auch ältere Versionen können dort als
Installationspaket für Windows herunter geladen werden. Für diese
Dokumentation wurde Python 3.10.5 verwendet und auf den
Versionen Windows 10 und 11 getestet.
Zur Installation wählen Sie die gewünschte Python-Version
(3.10.x) aus und laden Sie den passenden Windows Installer herunter -
bei den meisten modernen Systemen ist das Windows Installer
(64-bit). Starten Sie nach dem Download den Installer und beachten
Sie die angebotenen Optionen - idealerweise sollten alle Komponenten im
Fenster ausgewählt werden, insbesondere auch der
py launcher, der als ausführbare Datei im Verzeichnis
C:\Windows\installiert wird. Im zweiten Fenster des
Installationsprogramms gibt es weitere Optionen. Man kann
Python systemweit für alle Nutzer installieren, wenn man
Administrator-Rechte auf dem System hat. Ansonsten werden die Daten für
die Installation im Nutzerbereich als Unterordner im Verzeichnis
C:\Users\<name>\AppData abgelegt. Die Option
Asscociate files with Python sollte ebenfalls ausgewählt werden
- dann werden Dateien mit der Endung .py automatisch mit
der richtigen Anwendung (Python) gestartet. Auch die Option
Add Python to environment variables ist empfehlenswert,
damit alle im Unterverzeichnis \Scripts des
Python-Installationsverzeichnisses abgelegten Programme ohne
Pfadangabe ausgeführt werden können.
Als letztes kann noch das Installationsverzeichnis ausgewählt
werden;
hier empfiehlt es sich, einen einfachen Pfadnamen auszuwählen, damit man
später die Python-Installation wiederfindet und ggf. Desktop-Icons für
häufig genutzte Programme anlegen kann.
Die Verknüpfung von Python-Programmen mit der passenden
Anwendung kann auch noch nach der Installation erfolgen. Dazu mit der
rechten Maus auf eine Python-Datei klicken und “Öffnen mit”
anklicken, dann die Anwendung C:\Windows\py.exe auswählen.
Nun können Python-Programme durch Anklicken oder auch auf der
Kommandozeile durch Angabe ihres Namens ausgeführt werden. Ebenfalls
angegebene Parameter, wie Ein- oder Ausgabedateien oder Optionen, werden
dabei übernommen und an das Python-Programm übergeben.
Wenn Python systemweit installiert wurde, sollten alle mit
pip nachinstallierten Pakete ebenfalls mit
Administrator-Rechten installiert werden, damit die sie in den korrekten
Unterverzeichnissen der Python-Installation gespeichert
werden.
A4.3.
Eigenen Bereich in den Pfad der ausführbaren Programme aufnehmen.
Für Aufgaben in der Datenauswertung werden meist eine ganze Reihe von
Programmen benötigt, die Daten aus einem Arbeitsverzeichnis lesen oder
neue darin erzeugen. In Windows wird eine Liste von Pfaden verwaltet, in
denen nach den Namen von Programmen gesucht wird. Bei der Installation
werden diese Pfade dort üblicherweise eingetragen; allerdings gilt dies
nicht für Python-Programme, die auf anderem Weg kopiert werden,
z.B. die oben angeführten Werkzeuge für grafische Darstellungen oder zur
Funktionsanpassung. Damit diese Programme nur mit ihrem Namen ohne
Angabe des zum Teil langen Verzeichnispfades ihres Speicherorts
aufgerufen werden können, müssen sie in einem Verzeichnis liegen, das
sich im Suchpfad befindet. Dazu sollte ein entsprechendes Verzeichnis
angelegt, in den Suchpfad eingetragen und dann die benötigten Programme
(bzw. Links darauf, siehe unten) dort hin kopiert werden.
Dazu im Verzeichnis des Nutzers ein neues Verzeichnis für die
Hilfsprogramme erzeugen, z.B. mit dem Namen Programme:
> mkdir C:\Users\<name>\Programme
Dann auf der Kommandozeile das neue Verzeichnis in die Liste der für
ausführbare Programme durchsuchten Pfade eingeben:
> setx PATH "%PATH%;C:\Users\<name>\Programme"
Nun das Fenster schließen und die Eingabeaufforderung neu starten.
Mit
> path
den aktuellen Suchpfad ausgeben und überprüfen, ob alles korrekt
übernommen wurde.
Python-Programme oder andere .exe-Dateien, die in
das neu angelegte Verzeichnis kopiert wurden, können nun direkt mit
ihrem Namen ohne Pfad-Angabe aufgerufen werden.
A4.4. Link für Dateien
erzeugen
Programmdateien sind oft sehr groß, und daher legt man häufig nur
einen Verweis, einen “Link” anstelle einer Kopie an. In Windows gibt es
dazu den sog. Hardlink, den man nur über die Kommandozeile erzeugen
kann:
> mklink /h <Verknüpfung> <Ziel>
Wenn man also im gemeinsamen Bereich aller Hilfsprogramme solche
Hardlinks auf häufig benötigte Programme anlegt, kann man sie von jedem
Verzeichnis aus durch Eingabe ihres Namens starten.
Mit Eingabe von
> mklink /j <Verknüpfung> <Zielverzeichnis>
kann man auch auf ein ganzes Verzeichnis verweisen. Dies ist
nützlich, um ggf. lange Pfade abzukürzen.
Mit dem Befehl
> del <Ziel>
kann man solche Links auch wieder löschen, ohne dabei die
Originaldaten zu beeinflussen.
A4.5 Arbeiten mit Origin
[Origin] ist eine
weit verbreitete kommerzielle Software ausschließlich für das
Betriebssystem Microsoft Windows zur Visualisierung und Analyse von
Daten, das nur gegen Lizenzgebühr genutzt werden kann. Origin
ist im Softwarekatalog für Akademische Forschung und Lehre enthalten und
für KIT-Angehörige im [Softwareshop
des KIT SCC] kostenlos verfügbar.
Origin zeichnet sich durch ein an Microsoft Excel
angelehntes Bedienkonzept aus, das Datenerfassung ähnlich wie in
gängigen Programmen zur Tabellenkalkulation ermöglicht. Es gibt eine
sehr umfangreiche Auswahl an grafischen Darstellungsmöglichkeiten und
Analysewerkzeugen, zu denen auch die Anpassung beliebiger Funktionen an
Messdaten mit Unsicherheiten gehört. Origin deckt eine große
Palette an Anforderungen aus verschiedenen Wissenschaftsbereichen ab,
und daher ist die Auswahl der für physikalische Auswertungen sinnvollen
Einstellungen und üblichen Darstellungsformen nicht ganz einfach. In der
[Kurzanleitung
zu Verwendung von Origin für das Praktikum für Lehramt] sind die
notwendigen Informationen zusammengestellt.